Serie F eje sólido eje paralelo motor helicoidal
| Modelo | F37, F47, F57, F67, F77, F87, F97, F107, F127, F157 |
| Relación | 3.77 ~ 267.43 (IMAX: 18510) |
| Potencia de entrada | 0.12 ~ 160 kW |
| Torque de salida | 200 ~ 18000 N.M |
DESCRIPCIÓN
Serie de motores de engranajes helicoidales del eje paralelo son compactos y potentes que son perfectas para todas sus aplicaciones relacionadas con el diseño donde confía en componentes que ahorran espacio. Proporcionan condiciones de instalación óptimas gracias a su diseño delgado.
Al optar por uno de nuestros Gearmotors, ya está ahorrando tiempo y dinero con esta selección y planificación de proyectos. Esto se debe a que nuestro sistema modular permite una multitud de opciones de combinación para unidades de engranajes y motores. Por lo tanto, puede reducir los costos operativos, contar con una larga vida útil y beneficiarse del mantenimiento simplificado.
CARACTERÍSTICAS
- Adoptar diseño optimizado, combinación de módulos.
- Los motores de engranaje helicoidal de eje paralelo extra-slim son la solución perfecta cuando el espacio es limitado, generalmente se usa para viajar y levantar equipos.
- Adopta tecnología avanzada de molienda y tecnología de modificación de forma, que tiene una alta capacidad de soporte, operación confiable y bajo ruido.
- Buen rendimiento de sellado, adecuado para una amplia gama de condiciones de trabajo.
- Alta eficiencia de transmisión y ahorro de energía.
- Rentable y fácil de mantener.
Formulario de producto
- Etapa de transmisión: 2 etapa o 3 etapa.
- Forma de montaje: montado en el pie, montado de brida, B14 Monte de brida pequeña, brazo de par montado.
- Salida del ángulo recto: eje sólido, eje hueco (llave plana, disco retráctil, spline involte), eje sólido estrellado
Datos técnicos
| Relación | 3.77-276.77 |
| Potencia de entrada | 0.12-200kw |
| Torque de salida | 3.5-21700n.m |
| Velocidad de salida | 5-352RPM |
| Tipo de montaje | Montado en el pie, montado en el pie con eje sólido, brida de salida montada, eje hueco montado, brida B5 montada con eje hueco, pie montado con eje hueco, brida B14 montada con eje hueco, montado con orificio con agujero dividido, pie montado con disco de encogimiento, eje hueco montado con brazo anti-torque. |
| Método de entrada | Entrada de brida (AM), entrada del eje (AD), entrada del motor de CA o servomotor AQA |
| Liberación de freno | Liberación manual de HF (bloqueo en la posición de liberación del freno), liberación manual de recursos humanos (posición de frenado automático) |
| Termistor | TF (protección de termistor PTC Thermisto) TH (Sabordo Bimetal de Protección del Termistor) |
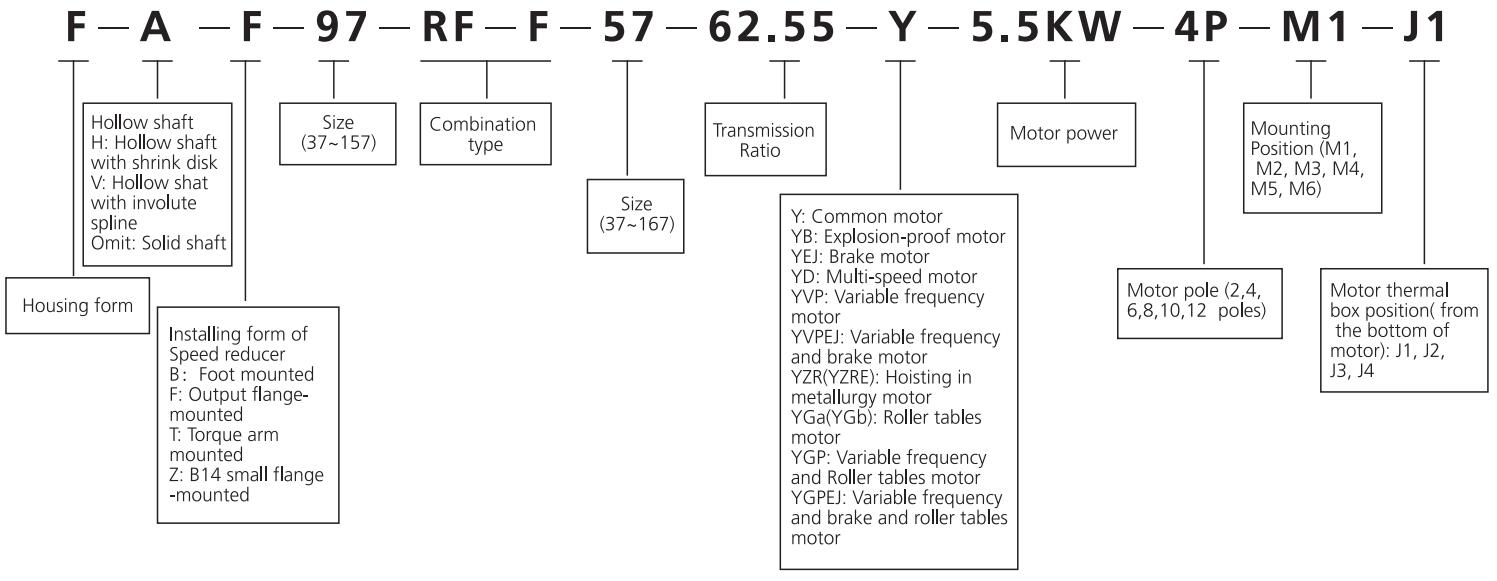
| Posición de montaje | M1, M2, M3, M4, M5, M6 |
| Tipo | F37-F157 |
| Eje de salida dis. | 25 mm, 30 mm, 35 mm, 40 mm, 50 mm, 60 mm, 70 mm, 90 mm, 110 mm, 120 mm |
| Material de alojamiento | HT200 Hierro fundido de alta resistencia de F37, F47, F57, F67, F77, F87 |
| Material de alojamiento | HT250 Hierro fundido de alta resistencia de F97 F107, F127, F157, |
| Tecnología de tratamiento térmico | Tratamiento de carbonización y endurecimiento |
| Eficiencia | 92%-94% |
| Lubricante | VG220 |
| Clase de protección | Clase IP55, F |
Calificación de potencia de entrada y torque máximo
|
Tamaño |
F37 | F47 | F57 | F67 | F77 | F87 | F97 | F107 | F127 |
F157 |
|
Estructura |
F fa ff faf lo hace |
|||||||||
|
Calificación de potencia de entrada (KW) |
0.18-3 | 0.18-3 | 0.18-5.5 | 0.37- 5.5 | 0.18-11 | 0.75-22 | 1.1-30 | 2.2-45 | 7.5-90 |
11-200 |
|
Relación |
3.81- 128.51 |
5.06- 170.27 |
5.18- 199.70 |
4.21- 196.46 |
4.20- 243.46 |
4.12- 270.68 |
4.68- 270.64 |
6.20- 255.25 |
4.63- 172.33 |
12.07- |
|
Torque máximo (N.M) |
200 | 400 | 600 | 820 | 1500 | 3000 | 4300 | 7840 | 12000 |
18000 |
Modelos disponibles (motor helicoidal de eje paralelo)
|
Versión
|
Tamaño
|
||||||
|
27
|
37
|
47
|
57
|
67
|
77
|
||
|
F..
|
Motor helicoidal de eje paralelo montado en el pie
|
F27
|
F37
|
F47
|
F57
|
F67
|
F77
|
|
FA..B
|
Motor helicoidal de eje montado en el pie / hueco
|
FA27B
|
FA37B
|
Fa47b
|
FA57B
|
FA67B
|
FA77B
|
|
FV..B
|
Eje hueco / eje hueco montado en el pie
|
FV27B
|
FV37B
|
FV47B
|
FV57B
|
FV67B
|
FV77B
|
|
FH..B
|
Eje montado en el pie / hueco / disco contrario
|
FH27B
|
FH37B
|
FH47B
|
F57b
|
FH67B
|
FH77B
|
|
Ff ..
|
B5 montado en la brida
|
FF27
|
FF37
|
FF47
|
FF57
|
FF67
|
FF77
|
|
FAF ..
|
B5 eje hueco montado en brida
|
FAF27
|
FAF37
|
FAF47
|
FAF57
|
FAF67
|
FAF77
|
|
FVF ..
|
Eje hueco de brida B5 / eje hueco entrelazado
|
FVF27
|
FVF37
|
FVF47
|
FVF57
|
FVF67
|
FVF77
|
|
FHF ..
|
B5 TOJO MOTENTE / HOBLE PRODIMIENTO
|
FHF27
|
FHF37
|
FHF47
|
FHF57
|
FHF67
|
FHF77
|
|
FA..
|
Eje hueco
|
FA27
|
FA37
|
FA47
|
FA57
|
FA67
|
FA77
|
|
FV ..
|
Eje hueco / eje hueco estriado
|
FV27
|
FV37
|
FV47
|
FV57
|
FV67
|
FV77
|
|
FH ..
|
Eje hueco / disco retráctil
|
FH27
|
FH37
|
FH47
|
FH57
|
FH67
|
FH77
|
|
GORDO..
|
Brazo de eje hueco
|
Grasa27
|
Fat37
|
Fat47
|
Fat57
|
Grasa 67
|
Fat77
|
|
Lo hace ...
|
B14 eje hueco montado en la brida
|
FAZ27
|
FAZ37
|
FAZ47
|
FAZ57
|
FAZ67
|
FAZ77
|
|
FVZ ..
|
Eje hueco / eje hueco montado en brida B14
|
FA27B
|
FA37B
|
FVZ47
|
FVZ57
|
FVZ67
|
FVZ77
|
|
FHz ..
|
B14 Eje montado en brida / eje hueco / disco contrario
|
FV27B
|
FV37B
|
FHZ47
|
FHZ57
|
FHZ67
|
FHZ77
|
|
Versión
|
Tamaño
|
|||||
|
87
|
97
|
107
|
127
|
157
|
||
|
F..
|
Montado en el pie
|
F87
|
F97
|
F107
|
F127
|
F157
|
|
FA..B
|
Eje montado en el pie / hueco
|
FA87B
|
FA97B
|
FA107B
|
FA127B
|
FA157B
|
|
FV..B
|
Eje hueco / eje hueco montado en el pie
|
FV87B
|
FV97B
|
FV107B
|
FV127B
|
FV157B
|
|
FH..B
|
Eje montado en el pie / hueco / disco contrario
|
FH87B
|
FH97B
|
FH107B
|
FH127B
|
FH157B
|
|
Ff ..
|
B5 montado en la brida
|
FF87
|
FF97
|
FF107
|
FF127
|
FF157
|
|
FAF ..
|
B5 eje hueco montado en brida
|
FAF87
|
FAF97
|
FAF107
|
FAF127
|
FAF157
|
|
FVF ..
|
Eje hueco de brida B5 / eje hueco entrelazado
|
FVF87
|
FVF97
|
FVF107
|
FVF127
|
FVF157
|
|
FHF ..
|
B5 TOJO MOTENTE / HOBLE PRODIMIENTO
|
FHF87
|
FHF97
|
FHF107
|
FHF127
|
FHF157
|
|
FA..
|
Eje hueco
|
FA87
|
FA97
|
FA107
|
FA127
|
FA157
|
|
FV ..
|
Eje hueco / eje hueco estriado
|
FV87
|
FV97
|
FV107
|
FV127
|
FV157
|
|
FH ..
|
Eje hueco / disco retráctil
|
FH87
|
FH97
|
FH107
|
FH127
|
FH157
|
|
GORDO..
|
Brazo de eje hueco
|
Fat87
|
Fat97
|
Grasa107
|
Grasa127
|
Grasa157
|
|
Lo hace ...
|
B14 eje hueco montado en la brida
|
FAZ87
|
FAZ97
|
FAZ107
|
FAZ127
|
FAZ157
|
|
FVZ ..
|
Eje hueco / eje hueco montado en brida B14
|
FVZ87
|
FVZ97
|
FVZ107
|
FVZ127
|
FVZ157
|
|
FHz ..
|
B14 Eje montado en brida / eje hueco / disco contrario
|
FHZ87
|
FHZ97
|
FHZ107
|
FHZ127
|
FHZ157
|
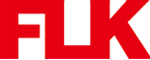
Tipo y designación
- Reductor de velocidad del motor directamente conectado: F-A-F-97-62.55-Y-5.5kw-4p-M1-J1
- Reductor de velocidad del motor conectado directamente (tipo de combinación): k-A-F-97-RF-F-57-62.55-Y-5.5kw-4p-M1-J1
- Con motor y brida de entrada: F-A-F-97-62.55-AM132B5-Y-5.5kw-4p-M1-J1
- Entrada de la brida montada, sin motor: F-A-F-97-62.55-AM132B5-M1-J1
- Con eje de entrada: F-A-F-97-62.55-AD4-M1
Nota:
AM132B5: Dimensión de la brida IEC (consulte nuestro catálogo)
AD4: Eje de entrada (AD1, AD2, AD3, AD4, AD5, AD6, AD7, AD8)
Código del motor:
*Y: motores estándar de 3 fases
*YB: motores a prueba de explosión
* YEJ: motores de freno
*YD: motores de múltiples velocidades
* YVP: motores de frecuencia variable
*YCT: motores de regulación de velocidad electromagnética
*YR: Motores de grúa y metalurgia
*YVPEJ: Motores de frecuencia y freno variables
*YG: motores de mesa de rodillos
*YGPEJ: frecuencia variable y motores de mesa de frenos y rodillos
Posición de montaje
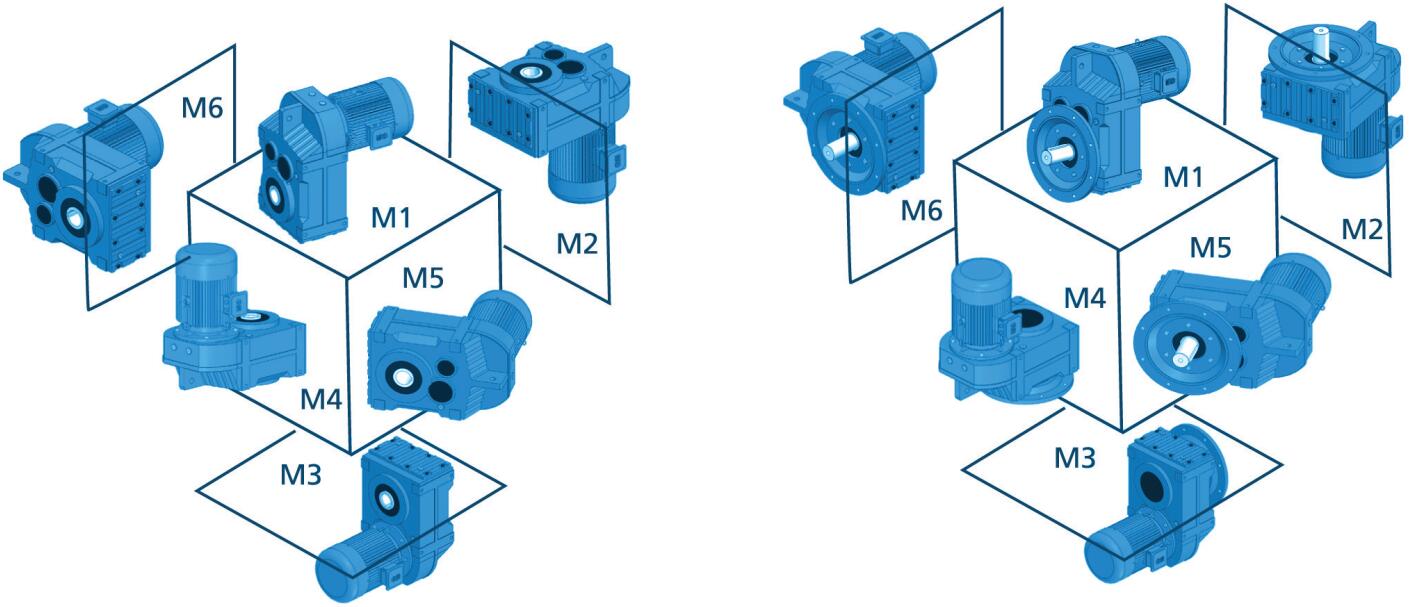
Posición de la caja terminal del motor
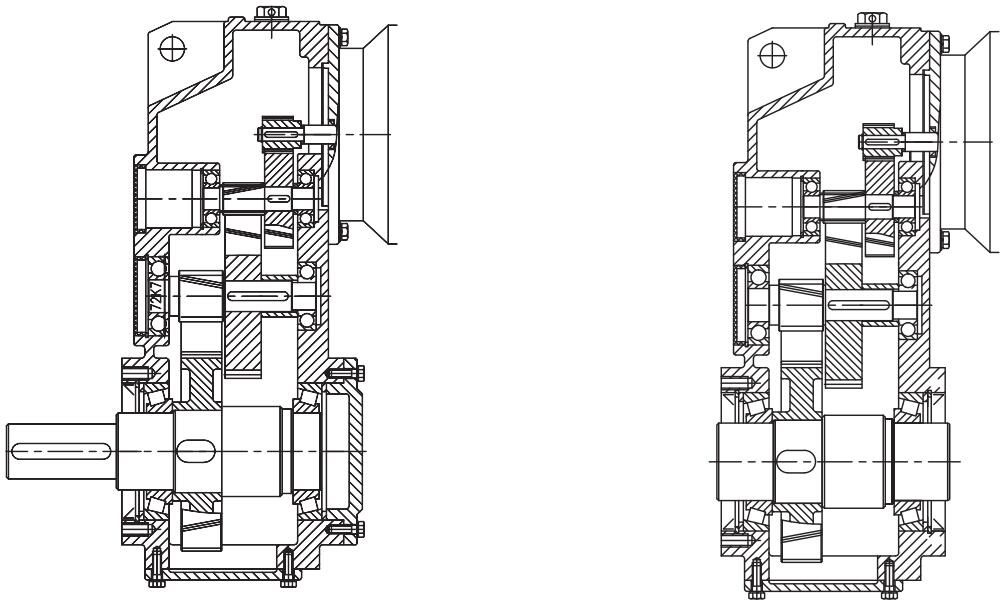
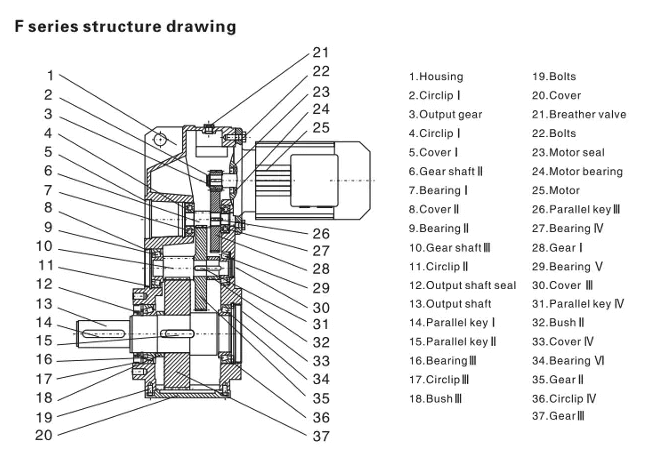
Dibujo de estructura
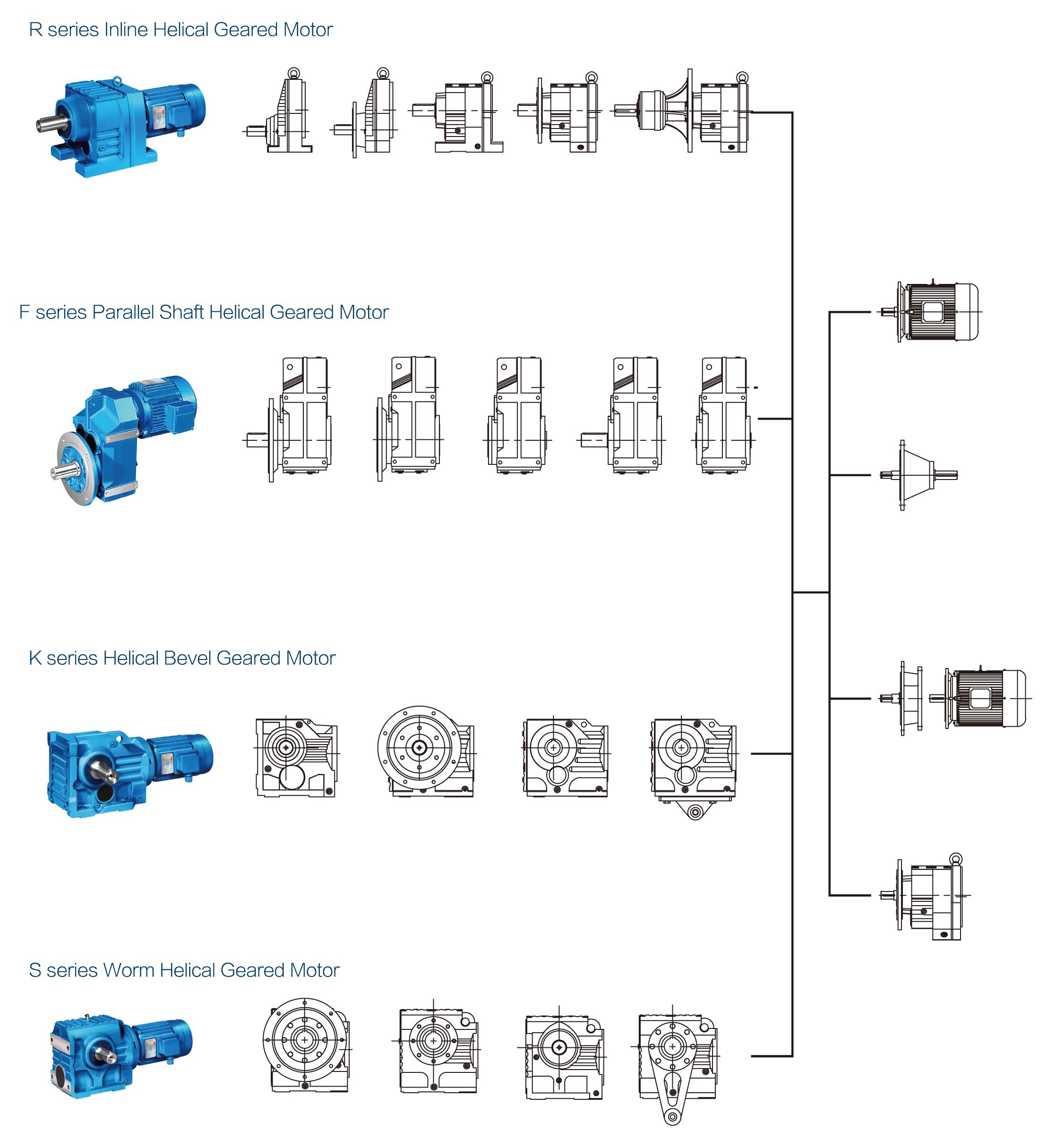
Diseño modular
Fotos de productos




Solicitud:
Motores de engranajes helicoidales del eje paralelo de la serie F se utilizan ampliamente en la industria ligera, alimentos, cerveza y bebidas, industria química, escaleras mecánicas, equipos de almacenamiento automático, construcción, maquinaria, metalurgia de hierro y acero, fabricación de papel, maquinaria de paneles a base de madera, fabricación de automóviles, maquinaria de tabaco, conservación de agua, impresión y embalaje, farmacéuticos, textiles, materiales de construcción, logística, maquinería de alimentación, protección ambiental y otros cálculos.